|
LAUNCH COMPLEX 39
|
LE SYSTEME OPTIQUE PHOTO ET VIDEO DU LC 39 Le centre spatial Kennedy utilise le système de télévision opérationnelle OTV Operational TeleVision pour suivre les lancements du Shuttle de près, de même que les opérations d' intégration et l'atterrissage de l'Orbiter. Le système OTV permet à la NASA et aux contractants de diriger les opérations sur le Shuttle à distance sur le pad, dans les bâtiments d'intégration et sur la piste d'atterrissage. Des sondes et signaux lumineux aident les techniciens en assurant le maximum de sécurité. L'utilisation majeure du système OTV est bien sur la surveillance des opérations de compte à rebours, quand une douzaines de caméras vidéo sur le pad sont tournées vers le Shuttle. Le système OTV est basé sur des liaisons par fibre optique, câbles, caméras vidéo et écrans de contrôle gérés depuis les salles du LCC. Il comprend 210 caméras analogiques dont à peu près 10% sont en couleur. Quelques unes sont sensibles à l'infra rouge afin de détecter les fuites d'hydrogène et les feux. La plupart sont enfermées dans des boites étanches pressurisées à l'azote afin d' éviter les court circuit et la propagation du feu. 23 techniciens d'United Space Alliance sont chargés d'entretenir le système hérité du temps d'Apollo et mis à niveau en 2001 pour 33 millions $ en ajoutant des caméras digitales couleur et en assurant toujours plus de sécurité. Le prochain pas technologique sera l'utilisation de la HDTV, télévision haute définition. LE SYSTEME OPTIQUE DU LC 39 Le système de prise de vue optique du LC 39 date des premiers jours du programme Apollo en 1963. Pendant les années 1965-70, il a évolué et les installations furent terminée pour le premier lancement d'un Saturn 5 en 1968. Le système était considéré comme en avance sur son temps, il a évolué avec les années mais reste quand même fidèle au modèle original. Comme le Shuttle est un véhicule qui diffère du Saturn 5, l'emplacement des appareils de prises de vue est différent. Il est plus important au niveau du pad lui même que sur son périmètre. La mission principale du système de prise de vue est l'obtention de données pour particulièrement détecter les anomalies et étudier les détails du lancement comme l'allumage des moteurs, les déplacements mécaniques et la projection de débris. Des appareils sont aussi installées pour la presse, le multimédia et l'archivage. Le système de contrôle est situé dans les bâtiments du LCC et peut gérer jusqu'à 160 caméras présentes sur chaque pad, sur les MLP et les tours ombilicales. A T moins 3 minutes, la séquence est activée et suit un compte à rebours en parallèle avec celui géré par le LPS avec arrêt et mise en route. En plus des appareil-photo, le système est composé de tout un matériel associé tel que des pieds, plates-formes, supports, et cales, adaptateurs pour les appareils de prise de vue. A titre d'exemple, voici la description de la configuration OTV pour la mission 51 L de janvier 1986 qui a vu la destruction de l' Orbiter Challenger en plein vol. Le système est constitué de 108 caméras films et 69 caméras TV.
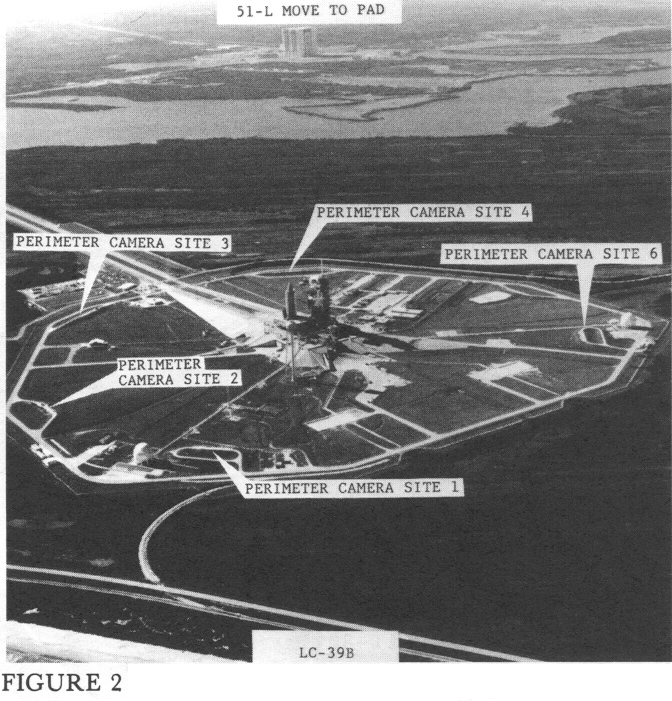
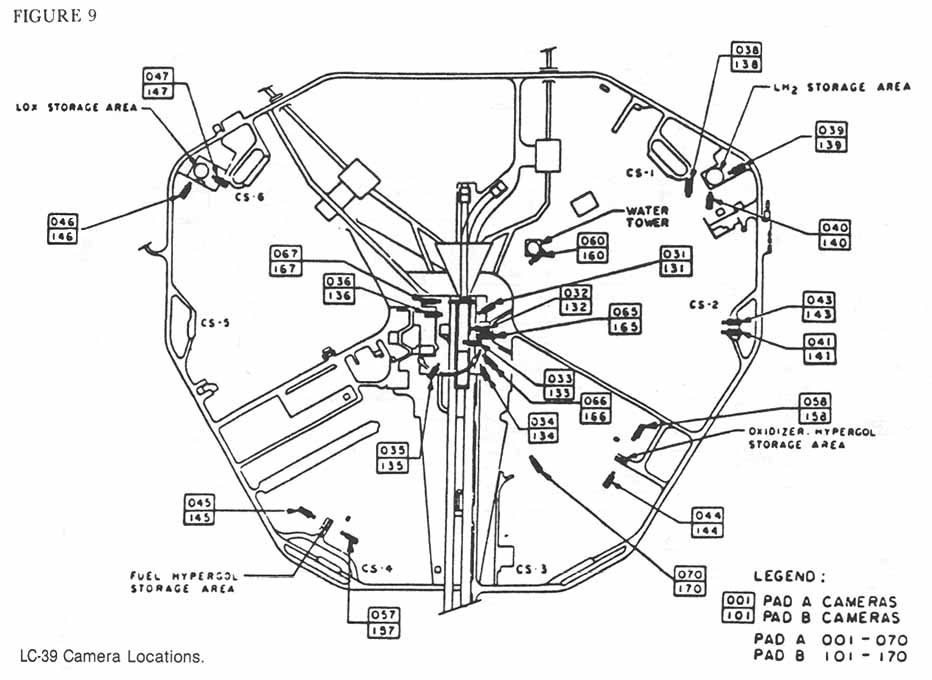
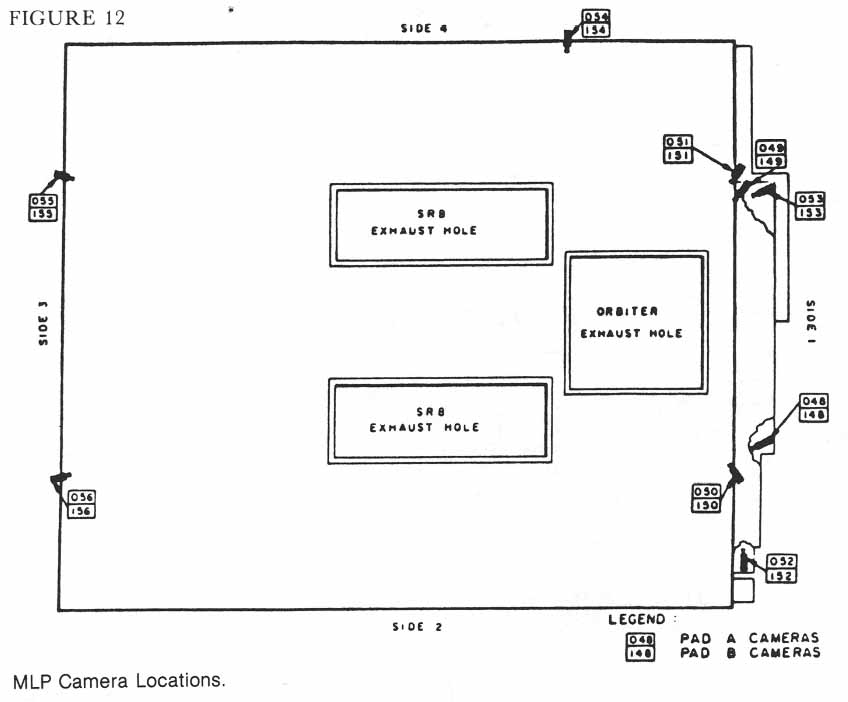
Vue aérienne du pad 39 B avec localisation des sites de caméras.
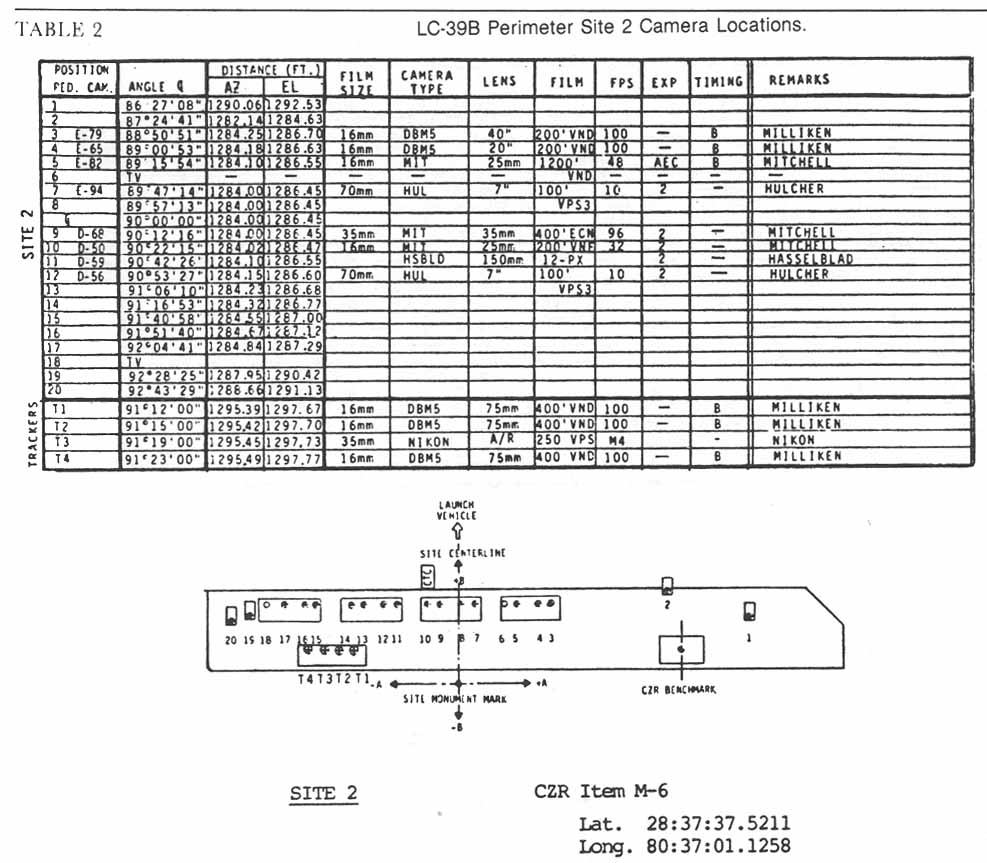
Seul le site 2, visant directement le Shuttle sur le pad est équipé de caméra de poursuite mobile Goertz commandées manuellement par joystick depuis le LCC.
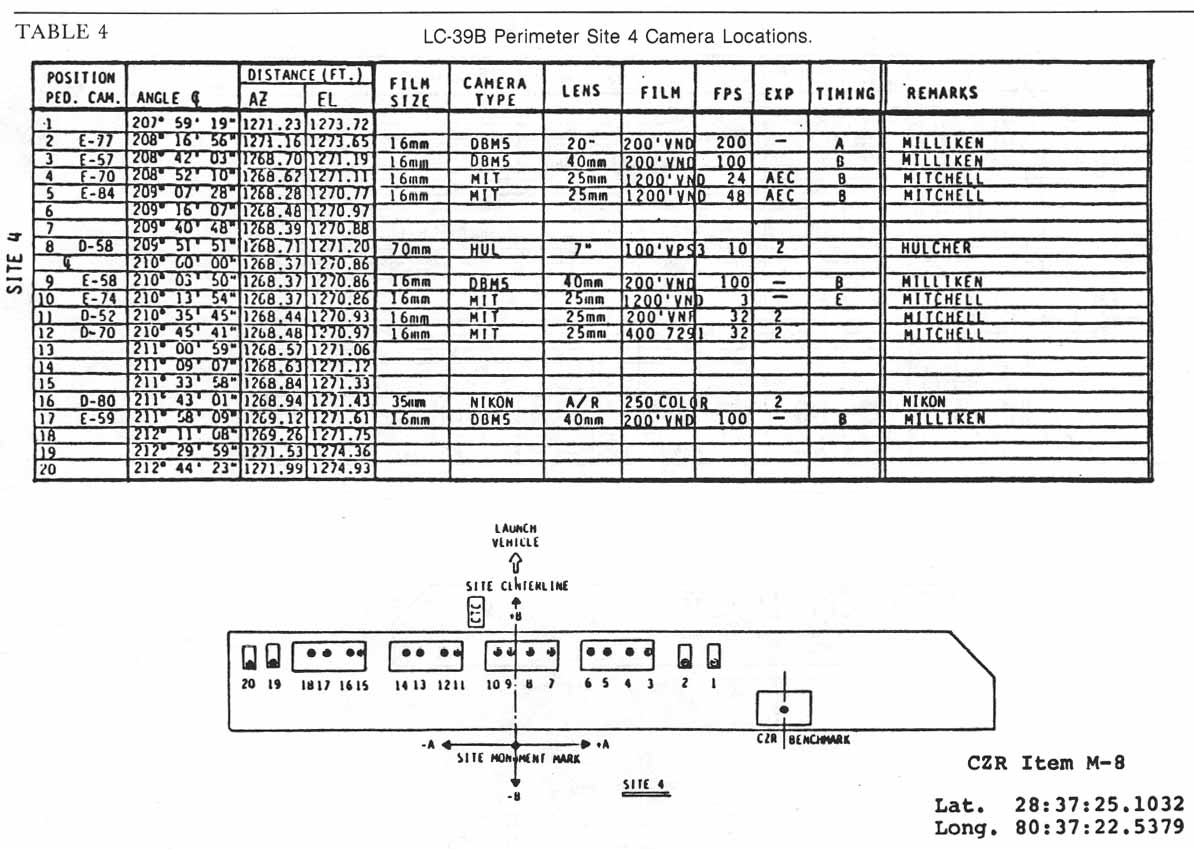
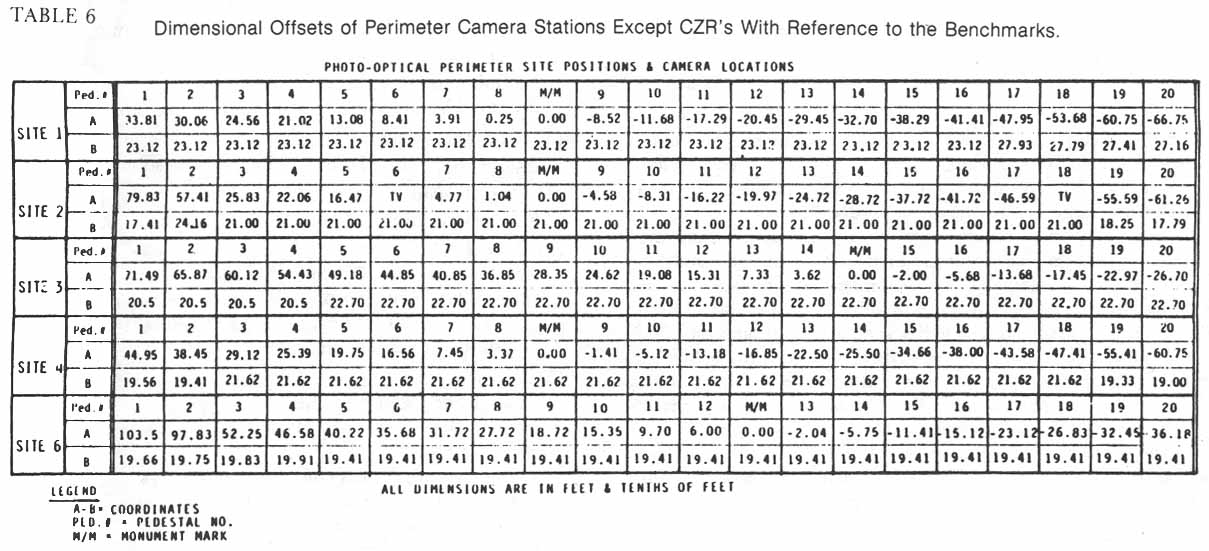
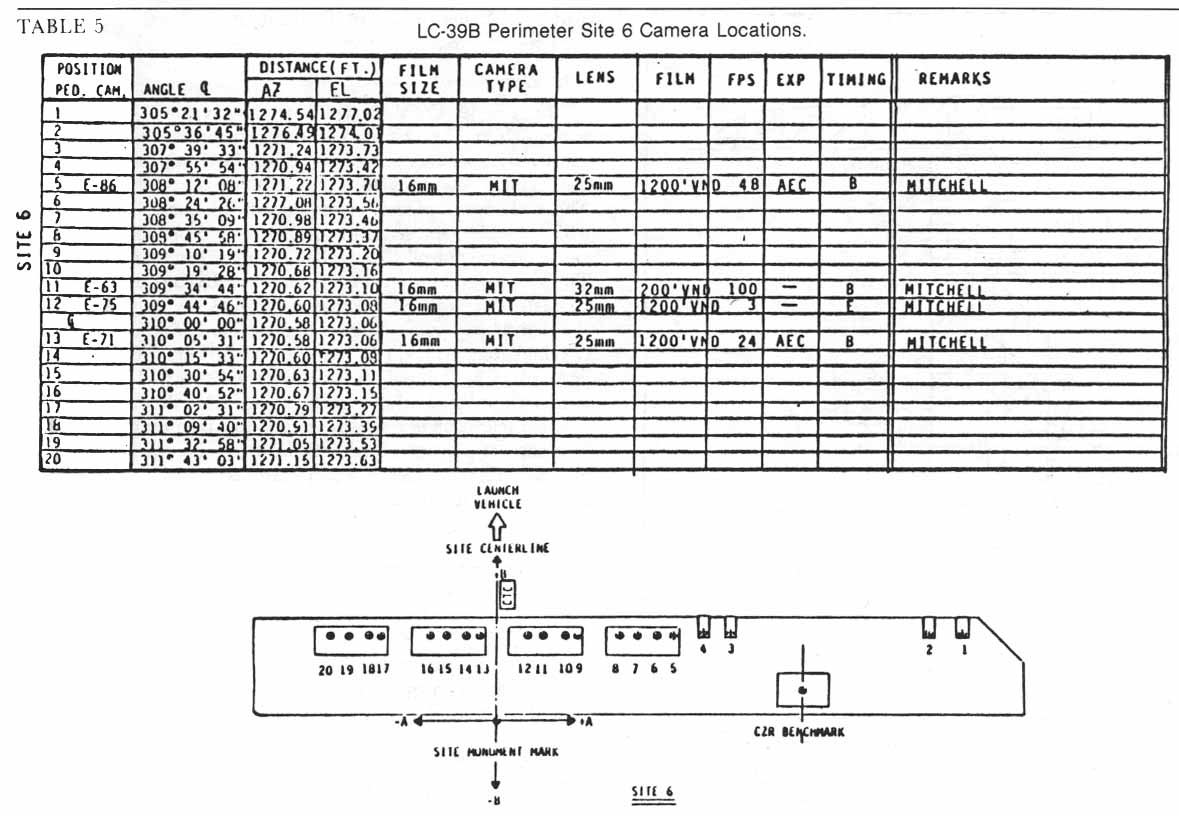
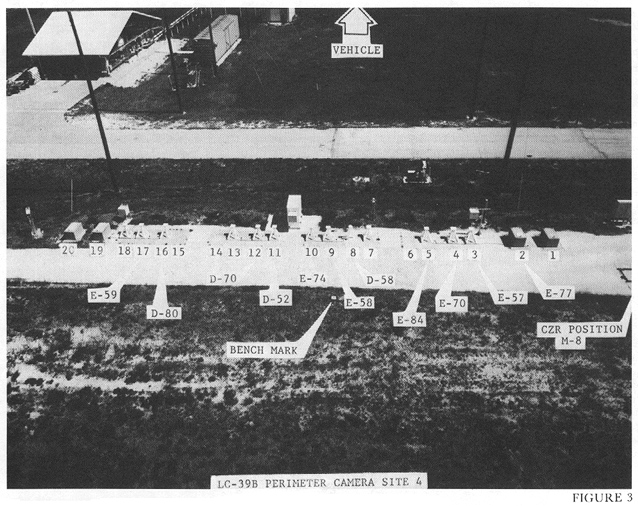
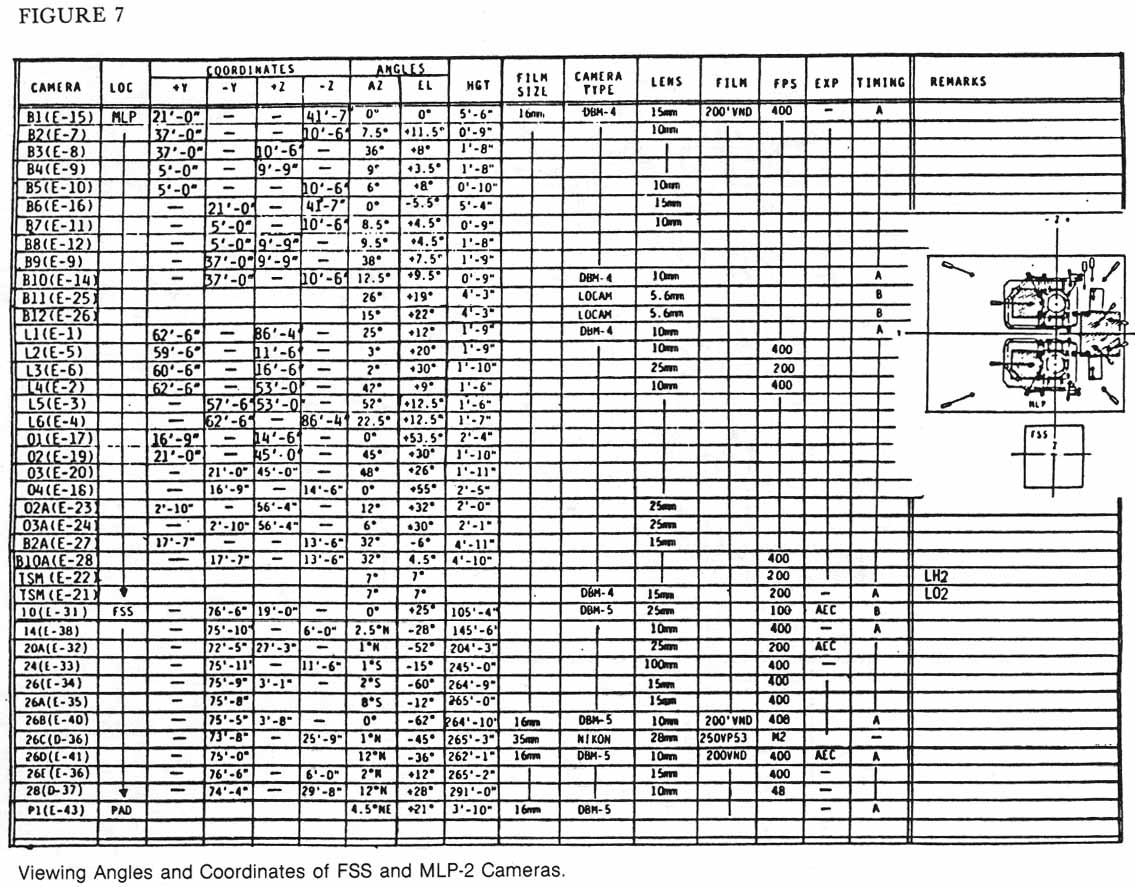
Vue du site de caméras sur le périmètre du pad, en l' occurrence le site 4. Les emplacements des appareil-photo sont relatif à l'axe vertical du réservoir externe en position de lancement. Il n' y a pas de site 5 puisque cet endroit est l'arrivée des paniers du système d'évacuation en urgence du pad. Des appareils sont aussi montés sur la tour ombilicale FSS et le MLP 2 et placés selon les tableaux ci dessous:
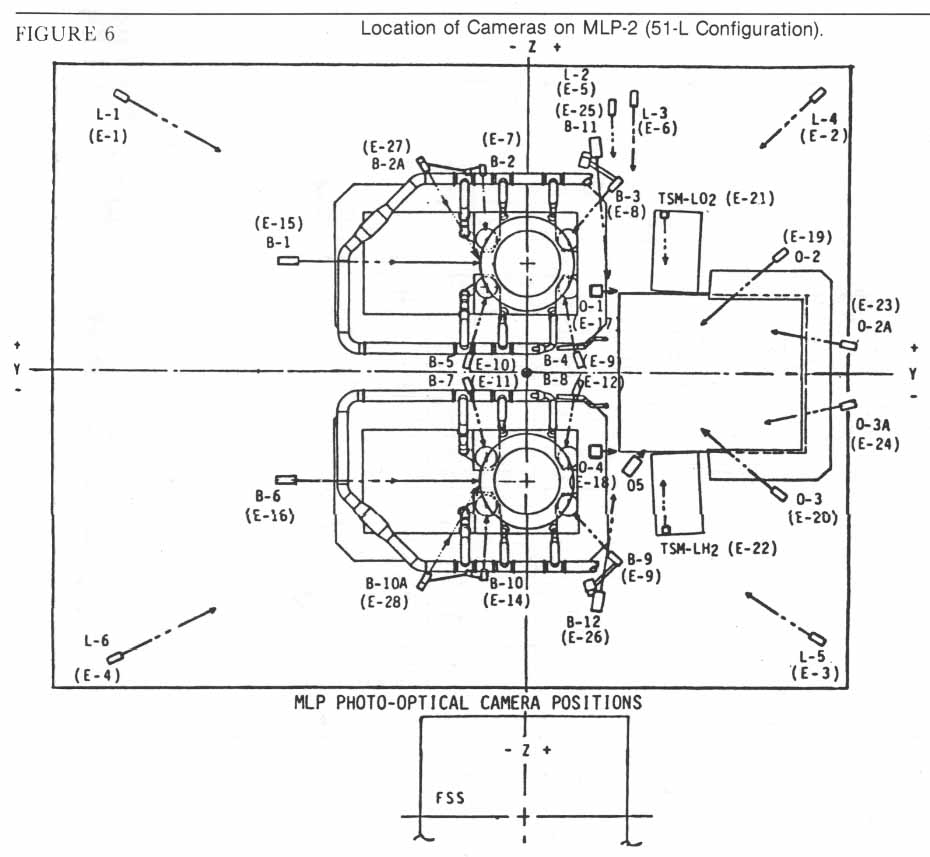
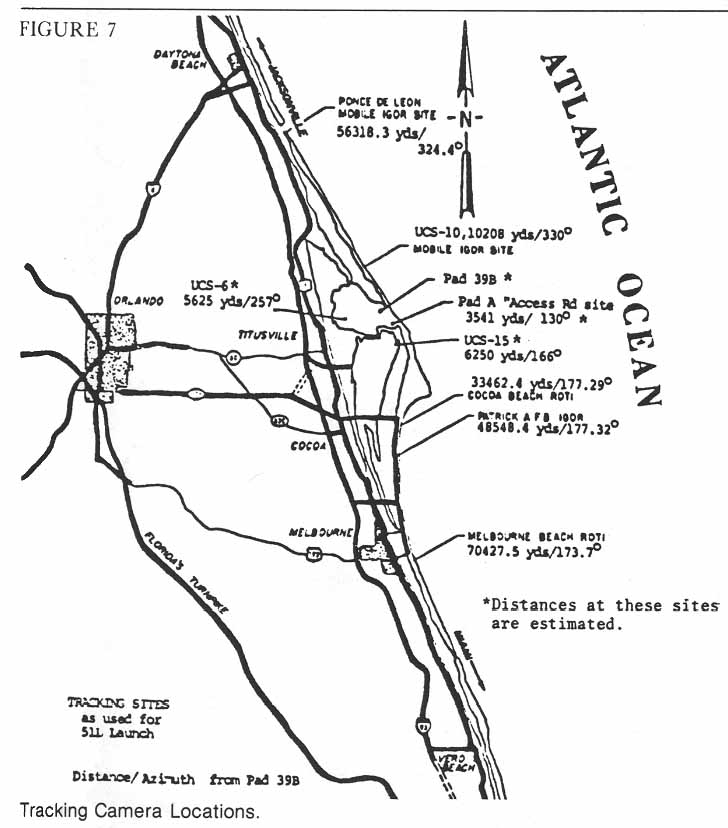
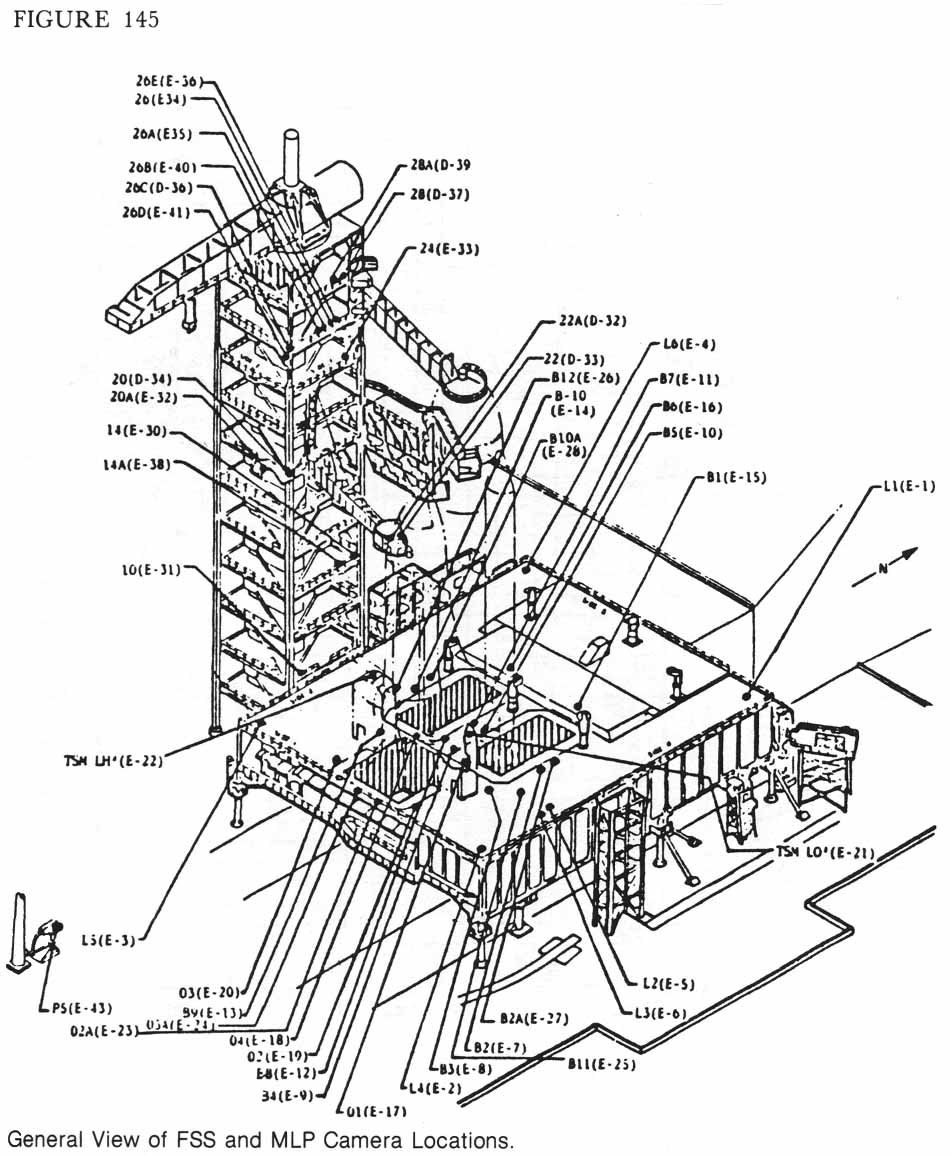
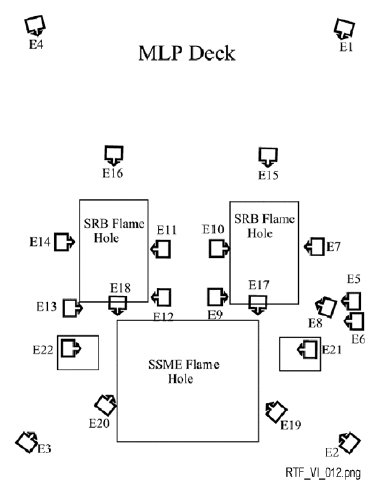
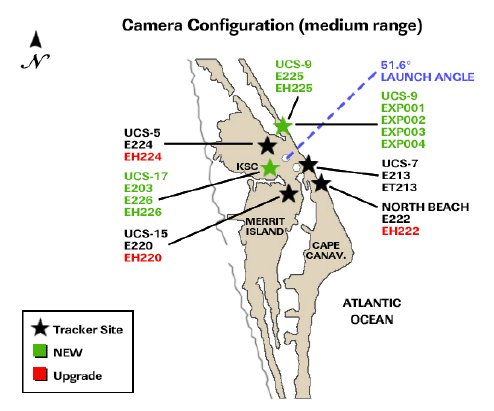
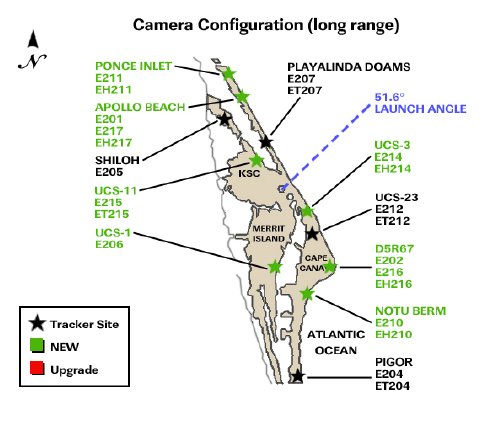
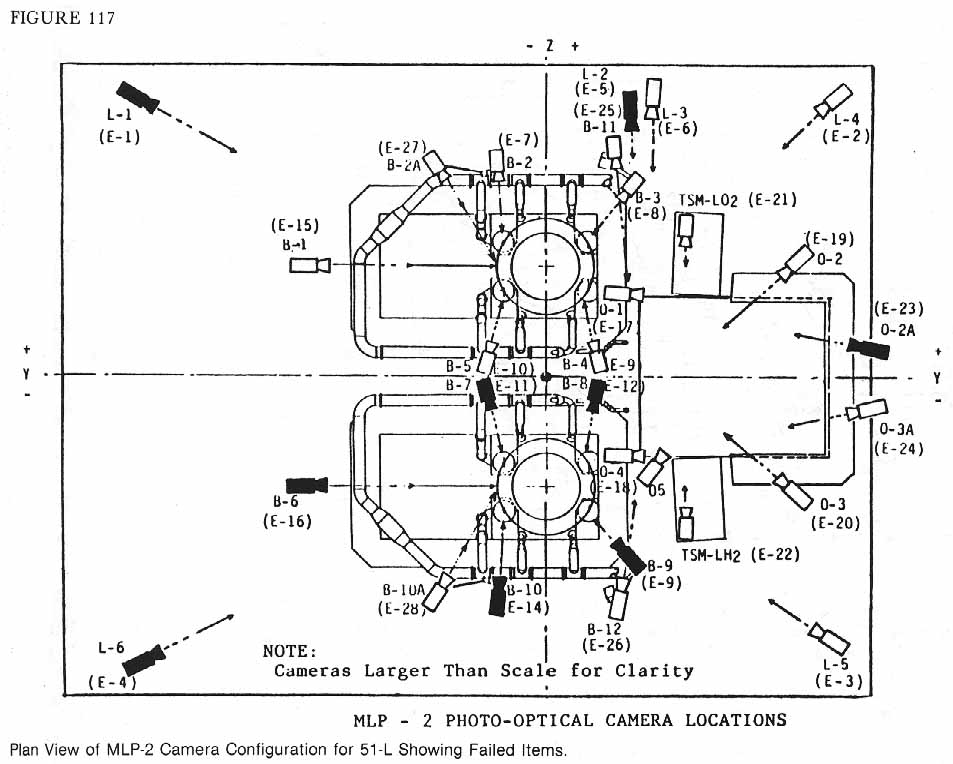 Emplacements des caméras sur le MLP 2 pour 51L (en noir, les 7 caméras tombées en panne) LES CAMERAS DE POURSUITE La couverture photographique de l'ascension du Shuttle utilise une série d'appareils situés en dehors du périmètre du pad afin d' assurer la meilleure vue du décollage à la séparation des boosters SRB ou jusqu' à la limite de visibilité LOV (Limit of Visibility). Aussi à l'allumage, trois appareils de poursuite sont mis en route, les IFLOT (Intermediate Focal Length Optical Tracker). Ils sont situé en hauteur sur les sites UCS Universal Camera Sites au Nord, Ouest et Sud du pad à 5 et 13 km de distance. Ils sont équipés d'appareils avec des objectifs de 16 et 70 mm pour couvrir le début du vol. Bien qu'il filme le décollage, les images sont meilleures quand le Shuttle arrive à 350 m d' altitude. Un autre appareil de poursuite (70 mm) est située 5 km au SE du pad et filme le décollage jusqu' à la manoeuvre de roulis pour la télévision. Les appareils de poursuite sur de longue distance sont montés sur des remorques mobiles ou stationnaires et sont reliés au radar de poursuite du Cap Canaveral et leur ordinateur. Ils sont de trois genres: MIGOR - Mobile Intercept Ground Optical
Recorder Les instruments utilisent des appareils 35 ou 70 mm couplés avec des lentilles qui rallonge la focale à 2,5 et 12,7 m. Ils sont du type autofocus et compensé en température.
La couverture par ces instruments va de la
première acquisition jusqu'à la limite de vol LOV. Deux postes sont situé au
Nord et deux vers le Sud le long de vol à une distance de 10 et 70 km. Deux appareils (un au Nord et une au Sud) traque l'Orbiter après la
séparation des SRB et les deux autres après la séparation SRB jusqu'à la
limite LOV. Tous les appareils de prises de vue sont
donnés pour une
performance optimale pendant la phase d' ascension tout au long de la journée
de 45 mn après le lever du soleil à 45 mn du coucher du soleil. En cas de
lancement hors de ces périodes, les niveaux d' exposition seront ajustés en
fonction. Enfin, toute la couverture de la poursuite de vol est dépendante des
conditions météo et de la couverture nuageuse au moment du lancement. LE SYSTEME VIDEO OTV Le critère d' implantation du système OTV pour le pad 39B et le MPL 2 et 3 et le même à quelques différences près que celui du système pour le pad 39 A et le MLP 1. Le système OTV du MLP 3 est la copie du système pour le MLP 2, lui même copie du MLP 1. Même chose pour le pad 39 B et A. Le système OTV du complexe 39 permet l' observation visuelle des activités de pré-lancement et lancement avec de caméras disposées stratégiquement sur les pads A et B, les OPF, le VAB et les MLP. Ces caméras TV sont équipées avec de dispositifs mobiles avec des zooms de 16 à 320 mm de focale télécommandées du LCC. Les images sont transmises par câbles coaxial avec une capacité de 10 canaux de TV FM multiplexés par câble. Dans le LCC, les canaux (90 par pad) sont démodulés et dispatchés sur des routeurs pour être distribués dans les différentes salles du centre et écrans TV. Certains canaux sont envoyés vers 25 lecteurs enregistreurs. Le système OTV permet:
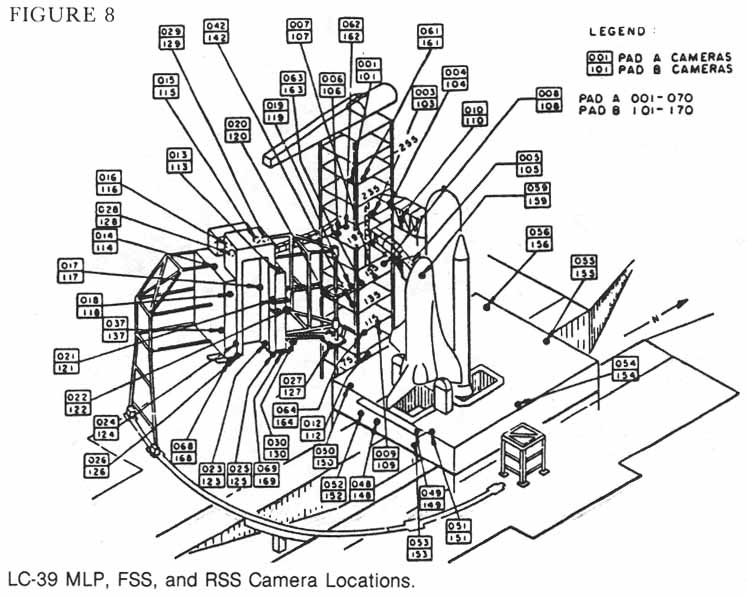
Le système OTV permet la couverture TV avec une définition de 450 lignes en N&B pour le pad et 280 lignes en couleur pour le bureaux des relations publiques PAO et réseau TV. Cette résolution est suffisante pour les réseaux TV et les vues générales au jour le jour. Maintenant elles restent insuffisante en cas d' analyses fines ou en cas de problème. Le placement des 70 caméras OTV sur le LC39 est montré sur les vues ci dessus. Elles sont référence par un numéro à 3 chiffres, 001 à 070 pour le pad A et 101 à 170 pour le pad B.
Emplacement caméras OTV sur le LC-39 MLP, FSS, et RSS et sur le périmètre du pad 39
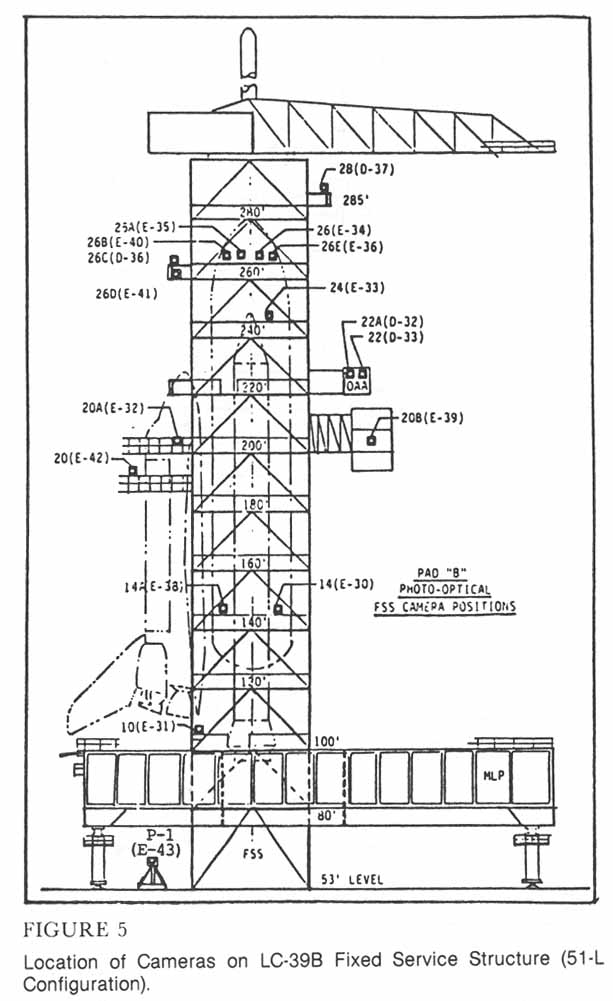
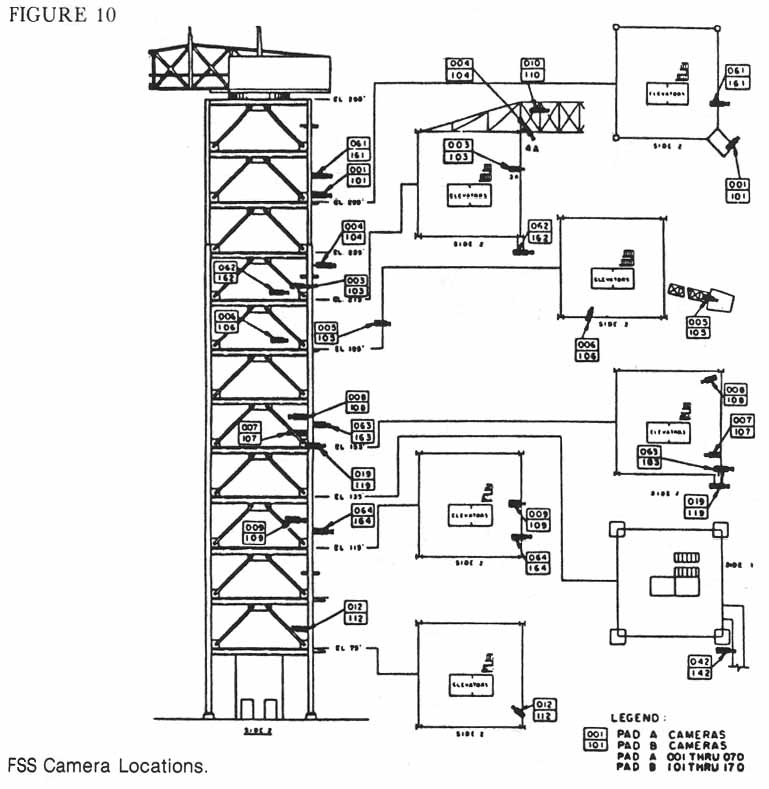
Emplacement des caméras optiques et OTV sur la tour FSS
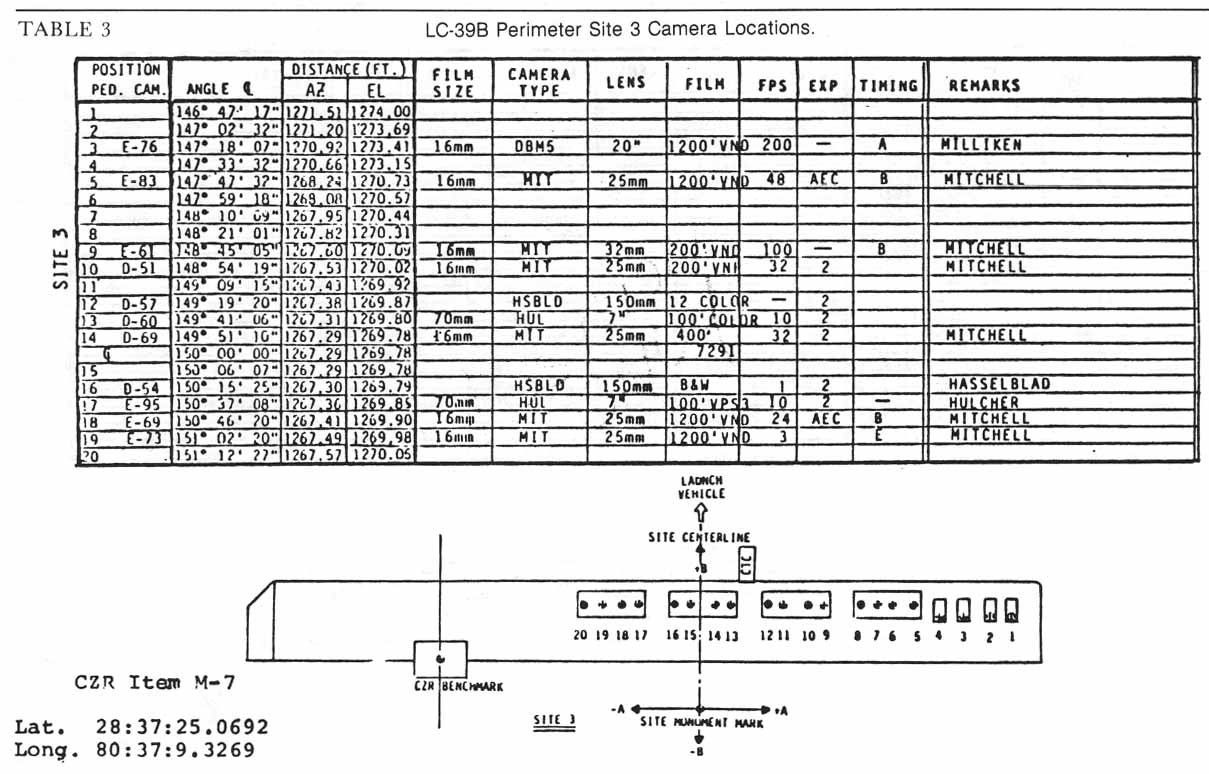
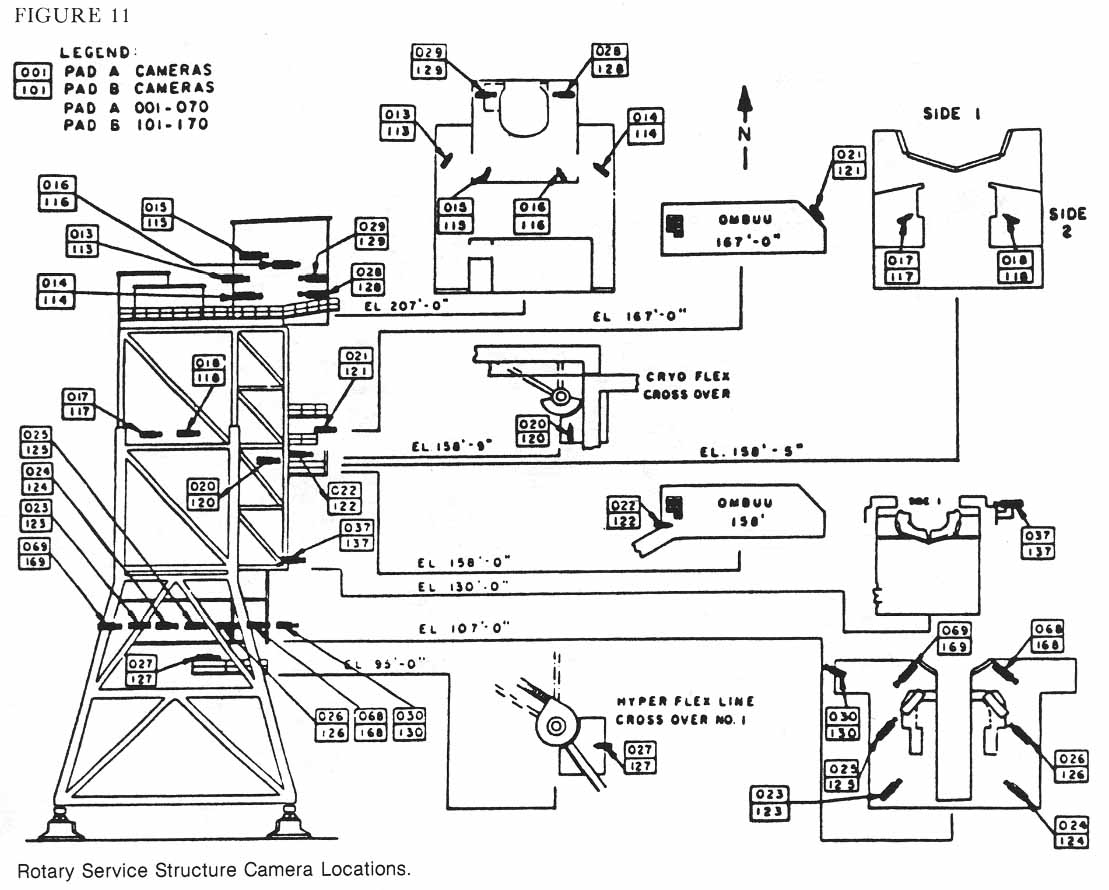
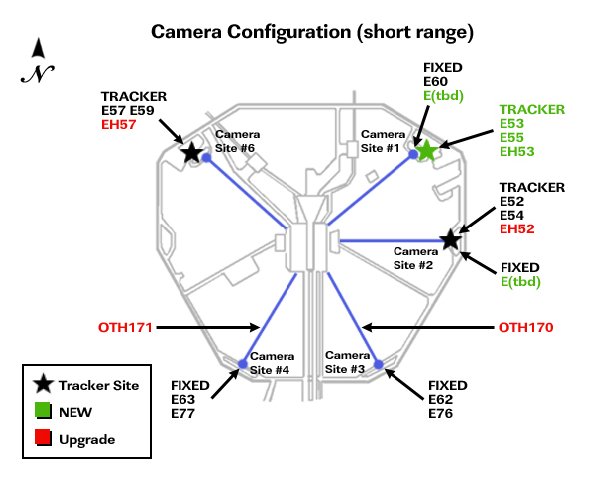
Emplacement des caméras OTV sur la tour RSS et sur le MLP Avant 2003, 4 caméras de poursuite à court rayon d'action ont été utilisé sur les pad, sur les sites 2 Est et sur le site 6 Nord-Ouest. Télécommandé par le LCC, elles se focalisaient sur la moitié supérieure et inférieure du STS. Les caméras du site 6 voyaient le bras de ventilation d'hydrogène qui se balance au décollage ainsi que la partie inférieur de l'aile gauche. Les caméras du site 2 voyaient elle la zone entre l'Orbiter et le réservoir. Le retour en vol de 2005 permet de moderniser le système OTV des pads 39. Les recommandations de la commission d"enquête sur l'accident de Columbia préconisent trois angles de vue de l'ascension du STS aussi bien du sol qu'en vol. Ces images supplémentaires permettent de voir avec plus de détail les éventuels débris pouvant se détacher du réservoir externe en pouvant heurter l'Orbiter. 107 appareils photos et caméras surveillent le vol 114 du lancement à la mise en orbite. Modernisées, les caméras sont maintenant en haute définition HDTV permettant des analyses plus fines et une mise à disposition plus facile entre les différents centres spatiaux, MSFC, KSC et JSC. Les trois sites de placement des appareils photos autour du pad sont désignés 1, 2 et 6. Le site 1 au NE permet les prises de vue de la zone entre l'ET et l'OV juste après le décollage. Il est équipé de 2 appareils films classiques et une caméra HDTV. Les cameras de poursuite à petit rayon d'action sont équipées d'appareils photos de 200 mm de focale (film de 121 m de long, 100 images par seconde). A cela s'ajoutent les appareils autour du pad, 42 en fixes avec des films 16 mm. Les appareils à moyen rayon d'action sont sur 6 sites, trois le long de la cote et trois près du LC39. Ils procurent des vues par triangulation pour localiser une zone précises du véhicule. Les appareils sont équipés de lentilles de 800 mm et opèrent à 100 images par secondes. Trois sont équipés de films de 121 m de long et 2 de 300 m. Les caméras de poursuite sont équipés de lentilles de 380 mm et 300 m de films. 5 des 6 sites ont des caméras en HDTV. Les 5 traceurs à long rayon d'action sont situées au nord et au sud du pad, de la plage de Shiloh à Cocoa. Une des caméras située sur la base de Patrick AFB a été convertit pour pouvoir être mobile et transporté au nord du pad. Elles ont des lentilles de 1000 mm et travaillent à la vitesse de 30 m secondes afin d'identifier le plus finement la trace des débris. Le KSC est équipé de plusieurs types de caméras et d'appareils de prise de vue. Les appareils 35 mm sont utilisés pour les caméra à courtes, moyenne et longues focales sur le pad (tour FSS D36) et sur les sites autour du pad (caméra D68 et une de poursuite sur le site 2, la D80 sur le site 4) pour des images de hautes qualité pendant l'ascension. Les caméras HDTV couplées avec les 35 mm permettent des analyses plus fines et plus rapide. Les caméras NTSC servent de secours au HDTV. Les caméras 70 mn (caméra D56 sur le site 2, D70 et E95 sur le site 3 et D58 sur le site 4) fournissent des vues "en grand" tandis que le MLP et la tour FSS abritent respectivement 22 et 8 caméras 16 mm.
Emplacements des caméras 16 mm sur le MLP Toutes les caméras fixes situées sur le MLP sont des Miliken DBM 4 et 5, ou en deux endroits des Redlake Lo-Cam. Les caméras E21, E22 et E5 opèrent en 200 images par secondes, les autres en 400 images par secondes. Elles sont chargées avec 60 m de films Eastman VND couleur 16 mm et fonctionnent 20 secondes environ, dès T- 10, 11 ou 12 secondes selon les endroits pour visualiser l'allumage des SSME. Elles sont enfermées dans des boites fixes dont l'inclinaison varie par palier de 10° jusqu'à 60° puis boulonnées. La position en azimut est soudés sur le MLP. Les boites sont isolées de la chaleur par des plaques d'acier et de l'enduit ablatif. Elles sont scellées et pressurisées à l'azote ce qui permet de refroidir la vitre devant et chassé l'eau.
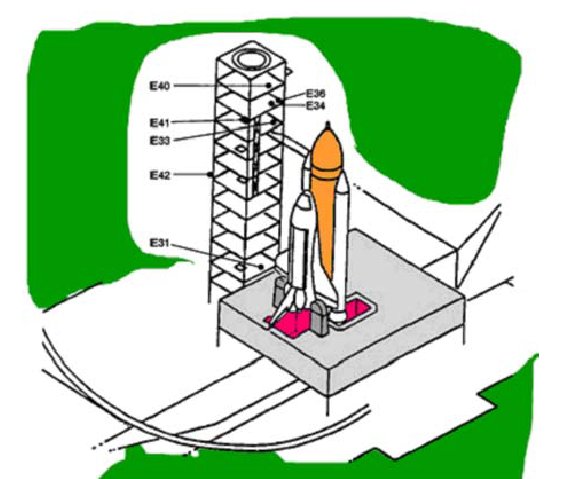
Emplacements des caméras 16 mm sur la tour FSS
Les trois sites à court rayon d'action autour du pad sont équipés de caméras 35 mm et HDTV. Elles permettent de couvrir le lancement dès que le Shuttle quitte la tour, relayées par les caméras des sites à moyen et long rayon d'action tant que le véhicule est visible.
Les films sont récupérés un et deux jours après le décollage et envoyé aux laboratoire de développement sur le centre avant d'être copié pour le centre Johnson et Marshall pour analyses. Les premières images sont disponibles entre 1 à 8 heures après l'envol. . |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| LAUNCH COMPLEX 39 TOUR FSS |
|
LAUNCH COMPLEX 39 TOUR RSS |
|
LAUNCH COMPLEX 39 EMERGENCY EGRESS SYSTEM |
|
LAUNCH COMPLEX 39 SOUND SUPRESION WATER SYSTEM |
|
LAUNCH COMPLEX 39 HISTOIRE |
|
LAUNCH COMPLEX 39 STOCKAGE CARBURANT |